BMS Control Loops Explained: Two-Position, Floating, and Proportional Control
Confused about Two-Position, Floating, and Proportional control in BMS? This guide breaks down all three control loop types in plain English, plus the setpoint, differential, and throttling range settings every BMS engineer needs to know.
6/20/20266 min read
If you've ever opened a controller's programming software and stared at terms like "throttling range" or "differential" with absolutely no idea what they mean — you're not alone. Every BMS engineer has been there.
Control loops are the heartbeat of any Building Management System. They're the reason a room holds its temperature, a damper opens at the right time, and a chiller doesn't short-cycle itself into an early grave. If you're working through a BMS training course or just trying to get your head around BMS basics, understanding these loops isn't optional — it's the foundation everything else is built on.
In this article, we'll walk through the three core control types — Two-Position, Floating, and Proportional control — the way you'd actually encounter them on a real job site, not in a textbook. We'll also cover the key settings (setpoint, differential, throttling range) that decide whether your system runs smoothly or hunts itself to death.
What Does a BMS Controller Actually Do?
Before we get into the control types, let's set the stage.
A DDC (Direct Digital Control) controller is the brain of the loop. It's constantly doing three things, over and over, all day:
Reads a value from a sensor (temperature, pressure, humidity — whatever it's watching)
Compares that value against its programmed logic
Sends a signal to an output device — a valve, a damper, a fan — to correct the situation
That's it. That's the whole loop. Sensor → controller → output → repeat. The difference between Two-Position, Floating, and Proportional control comes down to how that output device gets told to move.
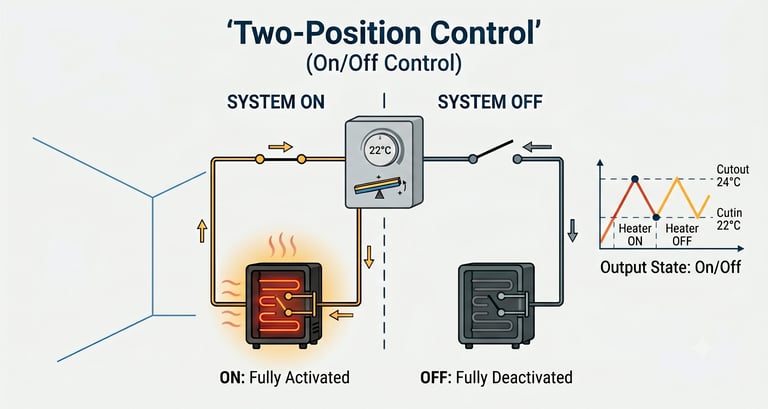
1. Two-Position Control: The On/Off Workhorse
Two-Position control — also called On/Off control — is the simplest type of control there is. The output is binary. Fully open or fully closed. On or off. There's no in-between, no partial state, nothing modulating in the middle.
A simple way to picture it: think of a basic electric space heater on a mechanical thermostat. Set it to 22°C, and the heater runs flat out until the room hits the cutout point — say, 24°C. Then it shuts off completely and stays off until the temperature drops again and the cycle restarts.
It's cheap, it's reliable, and for a lot of simple loads — exhaust fans, basic heaters, small pumps — it's exactly the right tool. You don't need precision control for everything in a building.
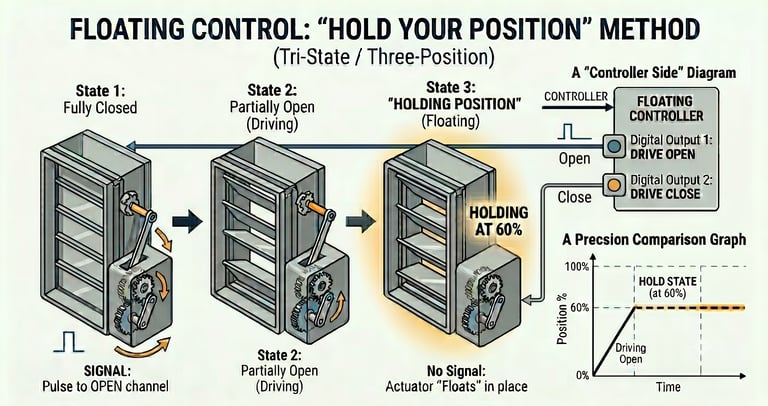
2. Floating Control: The "Hold Your Position" Method
Floating control (you'll also hear it called Tri-State or Three-Position control) adds something Two-Position can't do: a hold state.
Instead of just on/off, the controller can now drive an actuator clockwise (open), counter-clockwise (close), or — and this is the important bit — leave it alone entirely so it stays wherever it currently is.
How it actually works on the controller side: Floating control uses two digital output points instead of one. One point drives the actuator open, the other drives it closed. When neither point is energized, the actuator simply floats in place — it doesn't snap back to 0% or jump to 100%, it just stops.
Picture it like this: an air damper actuator gets a pulse on the "open" channel until it reaches 60%. The signal stops. The damper holds right there at 60% — no creeping, no drifting — until the controller decides it needs to move again.
This is a step up in precision from On/Off, and it's a common choice for damper actuators and valves where full proportional control would be overkill but a fixed open/closed state isn't good enough.
3. Proportional Control: Smooth, Modulating Precision
Proportional control is where things get genuinely smart. Instead of pulsing an actuator open or closed, the controller sends a continuous analog signal — typically 0–10V — and the size of that signal is directly tied to the size of the error.
In plain terms: a small temperature deviation gets a small response. A big deviation gets a big response.
If a room is just a touch warm, the cooling valve might only crack open to 15%. If the temperature spikes hard, the controller ramps that same valve up to 80% or 100% almost instantly. No clicking, no cycling, no overshoot-and-correct — just a smooth curve that tracks the error as it happens.
This is the control method you'll find on critical loads: chilled water valves, AHU coils, VAV boxes — anywhere stability and comfort actually matter.
Three Terms You Need to Know Cold
Understanding the control types is half the job. The other half is knowing the settings that make them behave correctly. These three terms come up constantly, and if you're commissioning or programming, you can't afford to be fuzzy on any of them.
Setpoint
The target value, plain and simple. If you tell the system to hold a room at 23°C, that's your setpoint. Every control loop exists to chase this number.
Differential — The Setting That Stops "Hunting"
Here's a problem unique to Two-Position control: if a device turns on and off at the exact same temperature, it'll cycle on and off rapidly, over and over. That's called hunting, and it's brutal on equipment — contacts wear out, motors burn up, and you'll be back on site sooner than you'd like.
The fix is a differential: a deliberate gap between the "turn on" point and the "turn off" point.
For example, if a boiler turns on at 20°C and doesn't turn off until 24°C, your differential is 4°C. That gap gives the equipment room to breathe instead of slamming on and off every few seconds.
Throttling Range — The Proportional Equivalent
For Proportional control, the equivalent concept is the throttling range (sometimes called the proportional band). This is the span of change in your controlled variable needed to drive the actuator across its full 0–100% range.
Say your setpoint is 22°C and your throttling range is 2°C. The cooling valve sits at 0% right at setpoint, and by the time the room hits 24°C, it's fully open at 100%. Everything in between modulates smoothly along that 2-degree band.
Get the throttling range too tight, and the valve will hunt like a Two-Position loop with no differential. Set it too wide, and your control becomes sluggish and unresponsive. Tuning this correctly is part art, part experience — and it's a big part of what separates a system that "works" from one that actually performs well.
Watch the Full Walkthrough
Reading through control loop theory is useful, but watching how these signals actually behave on real field devices makes it click a lot faster. I cover all three control types — with live examples on actual controller hardware — in the full video below.
Part of the BMS fundamentals series on the Tech Systems YouTube channel — subscribe if you want the rest of the control basics series as it drops.
Stop Manually Typing Out IO Lists
If you've sat through a project where you're manually counting points, building the IO schedule by hand, and double-checking your BOQ against a P&ID at 11pm before a submittal deadline — you already know how much time control engineering eats up before you even get to write a line of logic.
That's exactly the gap our BMS IO List & BOQ Automation Tool is built to close. Instead of typing out every sensor, valve, and damper point by hand, the tool maps your points and generates your IO list and bill of quantities automatically — cutting a job that used to take days down to minutes, with far fewer submittal errors.
It won't program your control loops for you. But it will get you to the programming stage a lot faster.
👉 Check out the IO List Automation Tool
Final Thoughts
Two-Position, Floating, and Proportional control aren't competing methods — they're different tools for different jobs. A simple exhaust fan doesn't need proportional precision, and a critical chilled water valve can't get away with On/Off cycling. Knowing which one fits which application, and tuning the differential or throttling range correctly, is what separates a system that technically works from one that runs efficiently for years without callbacks.
Which do you reach for more often on your valve assemblies — floating or proportional actuators? Drop a comment and let us know what you're working on. And if this helped clear things up, stick around — there's a lot more BMS fundamentals content coming.